

运动生物力学对人体运动仿生驱动机制的分析正在重塑人形具身机器人的驱动设计范式
发布时间:
2025-10-17 11:37
来源:
随着人形机器人技术的快速发展,其驱动系统的设计正经历一场深刻的范式转变。传统基于电机或液压的传动系统因其结构复杂、能耗高、刚性大等局限性,难以满足新一代人形机器人对低功耗、轻量化、柔顺驱动的需求。在这一背景下,运动生物力学对人体运动机制的分析正为机器人驱动设计提供全新的灵感源泉,推动着仿生驱动技术的革新。
运动生物力学分析解决方案
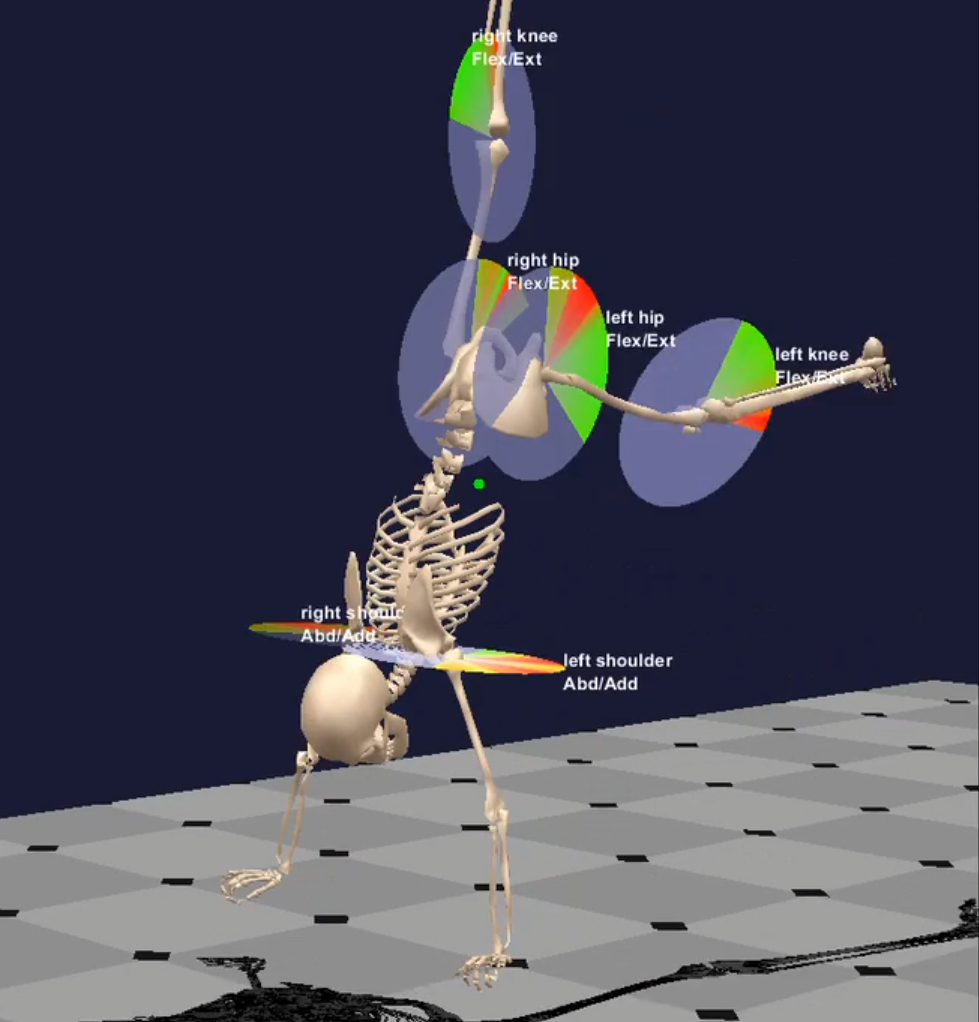
现代运动生物力学研究依赖于先进的计算机模拟和数据分析工具,其中BOB、OpenSim和AnyBody是三个关键平台,它们分别从不同角度解析人体运动的生物力学特性。
通过OpenSim平台,研究人员能够建立精确的人体肌肉骨骼模型,模拟不同运动状态下肌肉激活模式和关节受力情况[6]。这些模型揭示了人体运动中的能量传递效率和肌肉协同工作机制,为设计高效能人工肌肉系统提供了理论基础。
AnyBody建模系统的逆向动力学分析功能,使工程师能够预测特定运动任务中的肌肉激活模式和关节负载分布[7]。这些分析结果直接指导了人形机器人驱动系统的优化设计,特别是在多关节协调运动和能量效率方面。
综合运用BOB、OpenSim和AnyBody等生物力学分析工具,研究人员能够系统解析人体运动的能量传递、肌肉协同和关节负载特性,为开发新一代仿生驱动系统提供了量化设计依据。
生物力学原理引领驱动材料创新
人体肌肉系统的高效能、柔顺性和自适应特性为人工肌肉纤维驱动器的设计提供了理想蓝图。近期研究表明,形状记忆合金(SMA)作为人工肌肉材料展现出巨大潜力。中国科学技术大学团队开发的19自由度轻量化假手,集成了38个SMA执行器,手部重量仅0.22公斤,却能执行33种标准抓取模式和6种高级抓取模式,展现了SMA在高功率密度驱动方面的优势[1]。
基于OpenSim对人体手部肌肉协同机制的分析,研究人员优化了SMA执行器的布局和激活序列,实现了更接近人手自然运动的抓取模式。
中国科学院苏州纳米技术与纳米仿生研究所邸江涛研究员团队在人工肌肉纤维驱动器领域取得了突破性进展,包括:自恢复纤维驱动结构、低功耗电化学离子插层驱动方法,以及感知-驱动-反馈多功能耦合的人工肌纤维驱动器[2]。
仿生控制策略的革命性进展
运动生物力学研究不仅指导着驱动材料的设计,更重塑了机器人的控制范式。罗马尼亚"Gheorghe Asachi"技术大学的研究团队开发了基于硬件脉冲神经网络(HW-SNN)的混合软人工肌肉控制系统,该系统模仿生物神经控制机制,实现了更接近人类肌肉的自然控制效果[3]。
实验结果显示,该控制系统的位移性能比传统SMA系统提高了2.2-2.8倍,收缩幅度达到近12%,远超传统SMA线材的4-5%[3]。
通过BOB软件分析提取得到的人体运动数据,研究人员训练了更精确的神经网络模型,使机器人能够模仿人类的自然运动模式,实现更流畅、更高效的运动控制。
多目标强化学习
清华大学团队提出的偏好条件多目标强化学习(MORL)框架,解决了人形机器人 locomotion 中命令跟踪与外力顺应性之间的固有矛盾[4]。
神经形态控制
硬件脉冲神经网络(HW-SNN)通过模仿生物神经控制机制,实现了更接近人类肌肉的自然控制效果[3]。
速度-阻力模型
通过速度-阻力模型统一表示命令和外部力,使单个策略能够平滑地在刚性跟踪和高度顺应行走之间插值[4]。
气动混合驱动的新突破
上海交通大学团队开发的气动混合振荡器(PHO)代表了无电子控制驱动系统的重大进步。该设计集成了快速屈曲弹性梁、织物气室和开关阀,创造了通过软-弹性-刚性耦合机制的刚度梯度,将振荡频率提升至51Hz,是现有柔性振荡阀的3.3倍[5]。
基于PHO的仿生袋鼠机器人实现了5.1体长/秒的运动速度,比现有气动机器人快50倍[5],展现了在极端环境下高效自主执行的潜力。
这一设计灵感部分来源于AnyBody对人体跳跃运动中肌肉-肌腱系统能量储存与释放机制的分析,揭示了弹性元件在高效运动中的关键作用[7]。
未来展望与应用前景
运动生物力学启发的仿生驱动技术正在多个应用场景中展现价值。在康复医疗领域,柔顺、安全的驱动特性使机器人能够更好地与患者互动;在工业生产中,高功率密度、轻量化的驱动系统提升了人形机器人的工作效率和续航能力;在日常生活中,自然、顺应的人机交互使机器人更能融入人类环境。
随着材料科学、控制理论和制造技术的协同进步,仿生驱动技术有望在未来5-10年内实现商业化突破,为人形机器人带来更接近生物体的运动性能和交互能力。然而,该领域仍面临响应速度、能效优化和长期稳定性等挑战,需要跨学科团队的持续攻关。
结论
运动生物力学对人体运动机制的深入分析正在重塑人形机器人的驱动设计范式。借助BOB、OpenSim和AnyBody等先进分析工具,研究人员能够更精确地解析人体运动的生物力学特性,为仿生驱动设计提供量化依据。从仿生材料到神经形态控制,从气动混合驱动到多目标学习算法,这些创新技术共同推动着机器人驱动系统向更高效、更柔顺、更自适应的方向发展。随着研究的深入,我们有理由相信,仿生驱动技术将成为实现真正实用化人形机器人的关键突破口。
数据来源
组织再生与仿生驱动,人形机器驱动设计,人体运动生物力学分析,骨骼肌肉仿真建模,仿生驱动技术