

探索BOB人体骨骼肌肉仿真建模软件可以为仿生机器人的研发设计提供哪些数据支持?
发布时间:
2025-08-13 16:56
来源:
从精准的关节扭矩计算到肌肉能量动态模拟,现代仿真工具正将人类生物力学奥秘转化为机器人开发的通用语言。
人体运动之精妙,源于206块骨骼与600多块肌肉的协同工作,构成了一个高自由度的复杂动态系统。清华大学研究团队最近开发的全身肌肉骨骼模型包含700个肌肉-肌腱单元,揭示了这一系统的复杂性。英国BOB人体骨骼肌肉仿真建模软件作为专业生物力学分析工具,其默认配置包含超过600个运动肌肉单元,能够处理多种生物力学数据格式,为机器人开发者提供人类运动机制的精准洞察。
01 多模态数据处理与运动学分析
BOB软件的核心优势在于其强大的多源数据兼容能力。该平台支持处理C3D文件(基于Helen Hayes模型)、CALC文件(Perception Neuron导出)、MVNX文件(来自Xsens)等七种主流运动捕捉数据格式。这种兼容性使研究人员能够将真实人体运动数据快速转化为仿真模型输入。
在运动学分析方面,该软件提供解剖轨迹重建、身体姿态分析、点位置/速度/加速度测量等关键功能。这些数据对仿人机器人步态规划至关重要。例如,清华大学团队利用类似技术,通过分层低维表示方法实现了对人体全身肌骨系统和运动控制过程的精确建模。
最新版本还增强了视频同步分析功能,可绘制与运动数据同步的整流和非整流EMG信号,显示肌肉长度、收缩速度和肌力等物理肌肉信息。这些实时生理参数为机器人执行器的灵敏度调节提供了生物参考基准。

02 动力学参数输出与肌肉力建模
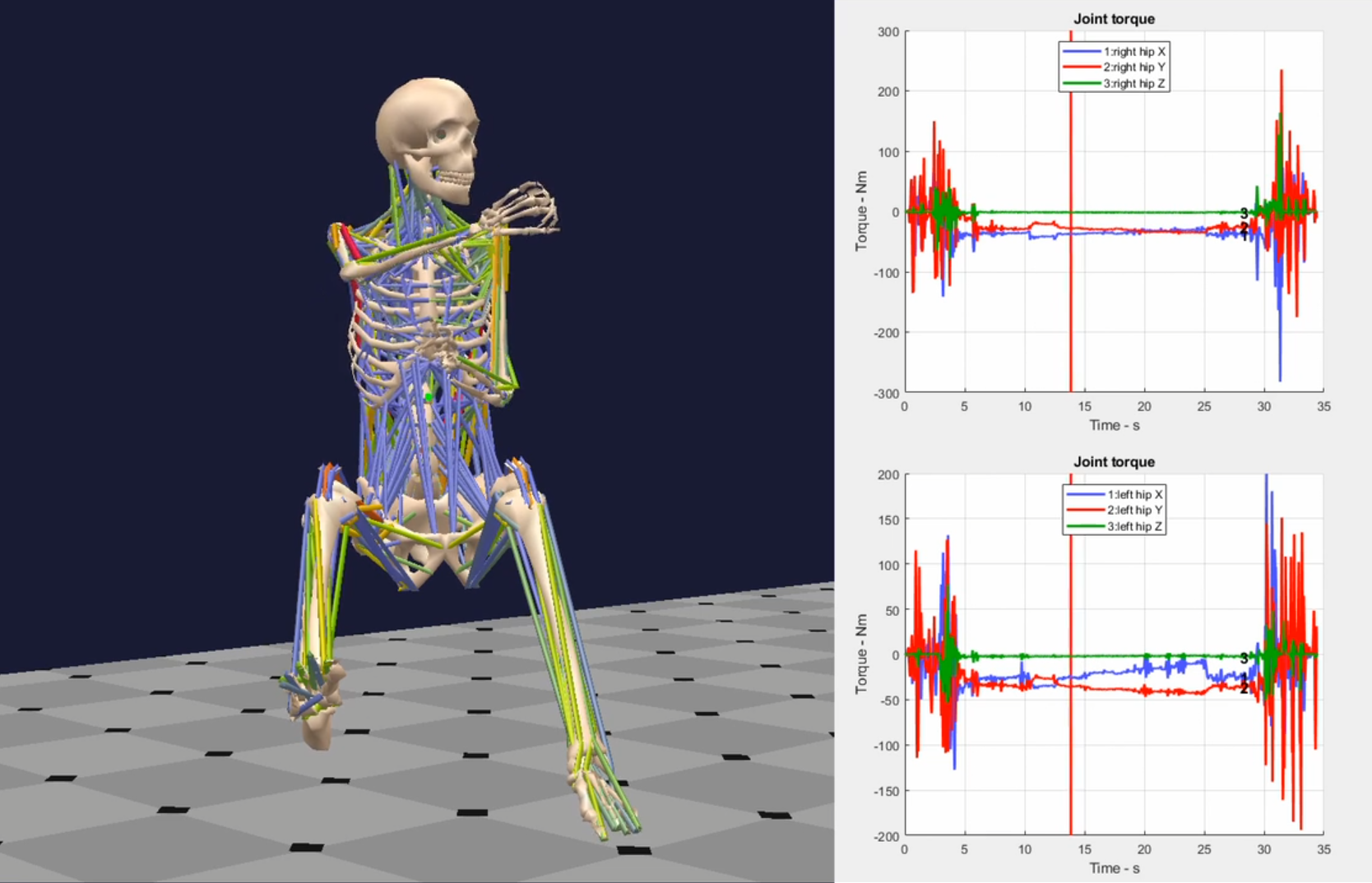
动力学分析是BOB软件的另一核心能力。该软件可精确计算关节扭矩、地面反作用力、关节接触力等关键生物力学参数。这些数据直接决定了仿生机器人的结构强度设计和动力系统配置。
软件采用Hill肌肉模型模拟肌肉收缩特性,其算法考虑了肌肉长度、等长肌力、收缩速度等多重因素。这与清华大学MS-Human-700模型中使用的肌肉建模方法一致。
在力预测精度方面,近期一项神经肌肉骨骼建模研究通过整合高密度肌电图与有限元模型,成功预测踝背屈力曲线(R²=0.95)。BOB的力学仿真精度已达到工业应用标准。
软件还提供肌肉能量/功率计算功能,可量化分析不同运动状态下的总肌肉能量消耗。这些代谢数据为仿人机器人的能效优化提供了生物参考指标,对延长机器人作业时间具有重要价值。
03 个性化建模与仿真控制
BOB平台支持个性化骨骼肌肉模型构建,用户可基于特定对象的医学影像数据创建定制化模型。这种个性化建模能力对医疗康复机器人的适配研究尤为重要。
在控制策略开发方面,该软件与MATLAB的无缝集成使研究人员能够实现复杂控制算法的快速迭代。清华大学团队采用的分层深度强化学习方法在类似平台上实现了700个肌肉单元的协同控制。
最新的研究进展显示,预测性肌肉骨骼模拟领域已发展出两大类方法:基于神经生理学的模型(肌肉反射模型和中枢模式发生器)和基于优化的黑箱方法(最优控制和深度强化学习)。BOB平台为这两类方法提供了验证环境。今年8月,国家地方共建人形机器人创新中心发布的“格物”具身智能仿真平台,实现了一套代码覆盖百余款机器人的新突破。BOB的生物力学数据输出可为此类平台提供人类运动本底参数,加速人机运动控制的融合。
04 行业应用与前沿融合
在康复机器人领域,BOB的动力学分析模块可量化模拟人体与辅助设备间的相互作用力。清华大学团队通过类似技术,实现了可穿戴外骨骼机器人接触力的最小化控制。今年3月发表的计算骨重塑模型综述指出,骨组织具有显著的压电特性,可将机械应力转化为电信号。BOB的力学仿真能力为研究这种生物电机械耦合机制提供了数字化工具。NVIDIA 8月11日最新发布的Omniverse NuRec库实现了射线追踪3D高斯泼溅渲染,可大规模重建真实世界场景。这种物理级精确模拟环境与BOB的生物力学数据结合,将为仿生机器人创建更真实的训练场景。
随着Cosmos Transfer-2模型即将推出,合成数据生成速度将大幅提升。BOB软件产生的高精度人体运动数据可作为物理AI训练的基础数据集,解决机器人训练中真实数据不足的瓶颈问题。仿生机器人的未来在于对人类生物力学本质的深刻理解。BOB软件提供的关节扭矩、肌肉力量、能量消耗等关键参数,已成为机器人开发者解码人类运动密码的基础词典。随着国家地方共建人形机器人创新中心“格物”平台等工具的出现,一套代码控制百余款机器人的愿景已成现实。而BOB积累的人类运动数据,正在赋予这些钢铁之躯以生命的韵律。
BOB人体骨骼肌肉仿真建模软件,人体运动生物力学分析,仿生机器人研发设计