

运动学数据如何推动仿生机器人的结构设计创新?
发布时间:
2025-07-14 10:27
来源:
引言
在科技飞速发展的今天,仿生机器人已经成为了一个炙手可热的话题。尤其是当我们谈及运动学数据指导结构设计时,更是让人充满期待。通过对人体运动的深入研究,科学家们能够从中提取生物力学数据,为仿生机器人的设计提供宝贵的参考。
人体运动的奥秘
人体是一个复杂而精妙的机械系统。每一个动作,从走路到跑步,都是众多肌肉、骨骼和关节协同工作的结果。在这一过程中,运动学数据,比如关节角度、肌肉力量及其作用时间,扮演了至关重要的角色。
生物力学数据的获取
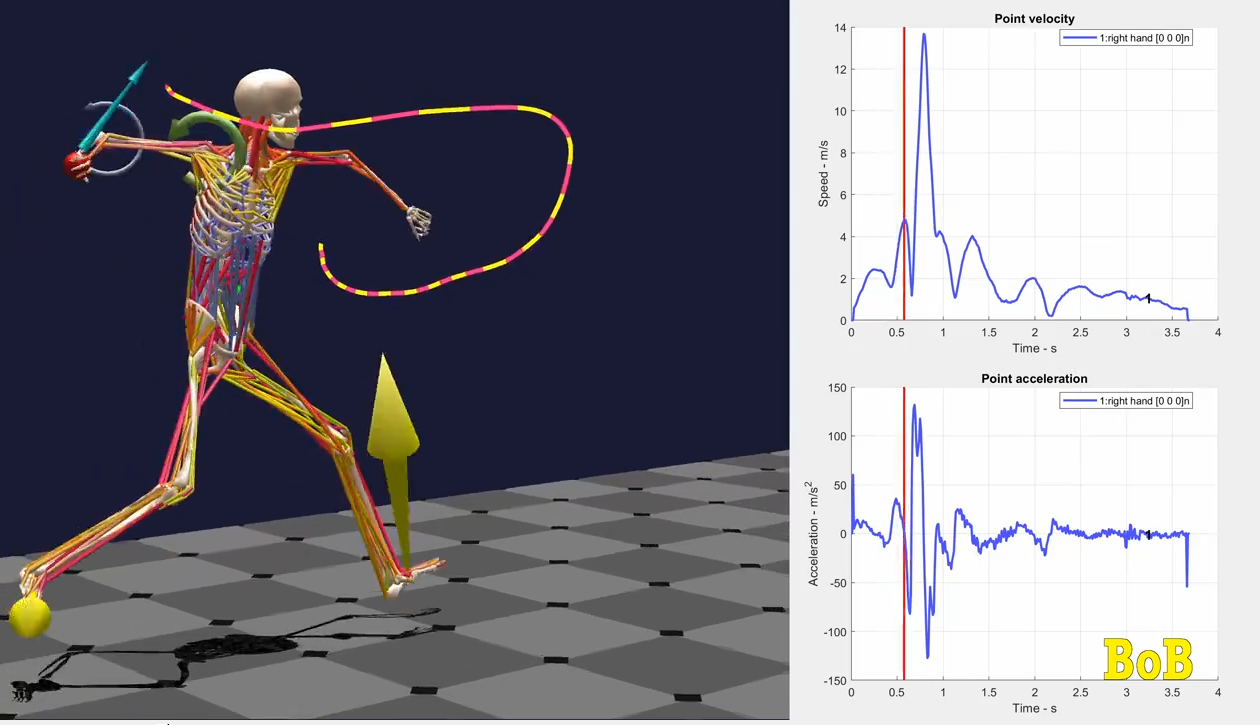
那么,如何获取这些运动学数据呢?通过高科技的运动捕捉系统,研究人员能够精确地记录下人体在运动时的各种参数。这些数据不仅帮助我们理解运动的机制,也为仿生机器人的设计提供了坚实的基础。
运动学数据指导结构设计的应用
在仿生机器人设计制造过程中,运动学数据扮演着核心指导角色,它像一份精确的“蓝图”,将抽象的生物运动转化为可实现的机械结构。其应用贯穿设计、优化和验证的全流程,具体体现在以下几个方面:

定义工作空间和关节活动范围:
目标: 机器人需要模仿的生物(如人、动物)其肢体末端(如手、脚)能到达的空间区域(工作空间)以及各关节的转动/移动范围。
应用: 通过正运动学分析生物的运动数据或目标轨迹,计算出末端执行器可达的空间边界以及各关节所需的最小和最大角度/位移。
指导设计: 直接决定了:
关节类型选择: 旋转关节、移动关节、万向节等的选择。
关节活动范围设计: 机械结构的限位设计、轴承选择、避免内部干涉。
连杆长度: 影响工作空间的大小和形状。
整体尺寸: 确保机器人结构能容纳所需的运动范围。
优化机构构型:
目标: 选择最合适的关节配置(如串联、并联、混联)和连杆布局,以高效、精确地实现目标运动。
应用: 逆运动学分析用于计算实现特定末端位姿所需的关节角度组合。通过分析大量目标位姿(从生物运动捕捉数据中获得)的逆解:
评估奇异点: 避免机器人在常用工作姿态附近出现奇异位形(此时关节速度趋于无穷大或失去某些方向自由度)。
评估灵巧性/可操作性: 选择在常用工作区域内关节运动效率高、控制精度高的构型。
避免关节限位冲突: 确保目标轨迹所需的关节角度组合在设计的物理范围内且不会导致连杆碰撞。
指导设计: 决定关节的数量、类型、空间排列顺序以及连杆的相对长度和形状,以实现最优的运动性能和避免运动干涉。
精确设计关节驱动和传动:
目标: 为每个关节选择合适的驱动器(电机、液压缸、气动肌肉等)和传动机构(齿轮、皮带、连杆等)。
应用: 运动学分析结合目标轨迹(速度、加速度曲线):
计算关节速度/角速度: 通过逆运动学微分(雅可比矩阵)将末端速度需求映射到关节空间。
计算关节加速度/角加速度: 进一步计算关节加速度需求。
计算负载惯量和扭矩: 结合动力学模型(虽然动力学更核心,但运动学是基础输入)和连杆质量分布,估算关节所需的最大、持续扭矩/力。
指导设计:
驱动器选型: 功率、扭矩/力、速度范围必须满足运动学计算出的峰值和持续需求。
传动比设计: 优化传动比,匹配驱动器特性与关节的速度/扭矩需求,实现高效能量转换和精确控制。
传动机构选择: 基于空间限制、效率、精度、回差要求等选择合适类型(如谐波减速器用于高精度、紧凑空间)。
轴承和支撑结构设计: 需要承受计算出的负载(力、力矩)。
预测和避免运动干涉与碰撞:
目标: 确保机器人在整个运动范围内,其自身的连杆、驱动器、线缆等不会相互碰撞或与环境碰撞。
应用: 利用运动学模型进行运动仿真。输入目标关节轨迹或末端轨迹,计算所有连杆在空间中的实时位置和姿态。
指导设计:
几何形状优化: 修改连杆的外形、开槽、挖孔等,为邻近部件或线缆留出空间。
线缆/管路走向规划: 确保在运动过程中不被拉扯或挤压。
外壳/防护罩设计: 在保证运动自由度的前提下设计合理的外形。
安装位置调整: 优化驱动器、传感器的位置。
指导传感器布局:
目标: 在关键位置布置传感器(编码器、IMU、力传感器、视觉相机等)以有效感知状态和控制。
应用: 理解运动学链和末端位姿的依赖关系。
指导设计:
关节编码器: 直接测量关节角度,是实现闭环位置/速度控制的基础。
末端传感器: 安装在末端执行器上直接测量其位姿或与环境交互力。
IMU安装: 考虑其在运动学链上的位置,以准确估计姿态和补偿运动。
验证设计可行性和性能:
目标: 在物理制造前,评估设计是否能完成预期任务。
应用: 基于运动学模型的数字孪生仿真。输入期望的任务轨迹(来源于生物数据或任务需求),模拟机器人的运动过程。
指导设计:
暴露设计缺陷: 提前发现工作空间不足、奇异点、关节限位冲突、运动干涉等问题。
评估性能指标: 如末端定位精度、重复精度、最大速度/加速度等是否满足要求。
优化轨迹: 在仿真中优化关节或末端轨迹,使其更平滑、高效、避障。
总结来说,运动学数据是连接生物运动目标与物理机械结构的桥梁:
量化需求: 将生物的运动能力(范围、速度、轨迹)转化为具体的、可测量的工程参数(关节角度范围、速度、工作空间)。
构型决策: 直接决定了关节数量、类型、布局和连杆尺寸等核心结构要素。
驱动选型依据: 为驱动器和传动系统的选型与设计提供关键的速度、扭矩需求数据。
几何避障基础: 是进行运动仿真、预测和避免物理干涉的前提。
设计验证工具: 通过仿真提前验证设计的可行性和性能,降低试错成本。
因此,在仿生机器人结构设计的前期,深入细致的运动学分析是必不可少的环节。 它为后续的动力学分析、详细机械设计、材料选择、控制算法开发等奠定了坚实的基础,确保最终制造出的机器人能够有效、可靠地模仿目标生物的运动能力。
仿生机器人的成功案例
在这个领域,有不少成功的案例值得一提。比如,某公司研发的四足仿生机器人,利用运动学数据,成功地模拟了狼的奔跑姿态。该机器人不仅能够快速穿越复杂地形,还能保持良好的平衡性,真可谓“技惊四座”!
未来展望
随着技术的不断进步,运动学数据指导结构设计的应用前景无疑是光明的。未来,仿生机器人将更加智能化,能够更加精准地执行复杂任务。同时,我们也期待更多跨学科的合作,推动这一领域的创新发展。
结论
总而言之,运动学数据在仿生机器人设计中起到了不可或缺的作用。通过对人体运动的深入剖析,我们不仅能够提升机器人的性能,还能开拓出更多的应用场景。让我们一起期待,未来的仿生机器人将如何改变我们的生活!
运动学数据指导结构设计,仿生机器人设计,运动生物力学分析
上一页
上一页