

先进研究者正在关注DIC的同步校准:测量稳健性和“自动网格划分”并肩同行!
发布时间:
2025-06-26 10:43
来源:
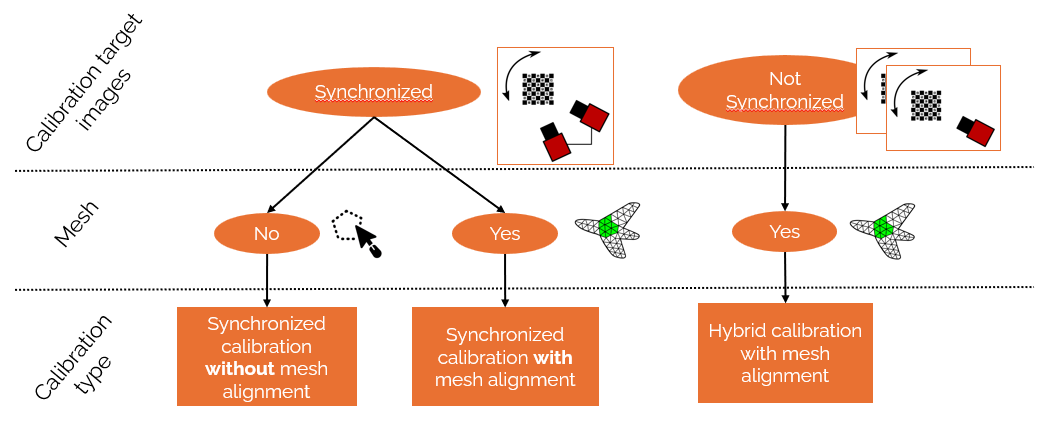
今天我们将和大家分享如何使用同步目标图像(有或没有网格对齐)进行校准,这是一种可以同时确定内在和外在相机参数的新程序。
此程序是对 EikoTwin DIC 中已有的混合方法的一种补充,当实验条件下无法实现相机同步时,该混合方法依然具有重要意义。本文将介绍该同步方法的基本原理、实际优势、具体实施步骤,以及在开展带传感器的力学测试过程中由此衍生的工作流程。
进行DIC测量时为什么需要进行同步标定(Synchronized Calibration)?
校准目标图像的同步可确保不同摄像头采集的图像之间实现理想的几何一致性。这种方法对EikoTwin DIC中已有的混合校准方法构成有力补充,尤其在某些无法实现同步的测试场景中,混合方法仍然具有实用价值。
采用同步标定方法,可带来以下优势:
增强校准稳健性:通过在测试图像采集时保持相机间的相对位置固定,该方法锁定了主/从相机间的相对姿态,从而减少了与有限元(EF)网格对齐过程中的不确定变量,有效增强了整个数字图像相关分析(DIC)流程的稳定性。
提高测量精度:同步采集有助于避免因相机间相对位置难以精确估计(特别是在测量网格接近平面时)而引起的测量偏差,尤其是在测量网格接近平面的情况下。这提高了外部矩阵的质量和三维重建的整体精度。
无需与有限元网格对齐:当实验仅需进行位移与应变测量(而非进行试验-仿真对比)时,该方法可省略预校准步骤,直接在图像上定义测量网格,大幅简化操作流程,在简单场景下,结果获取时间可缩短至3分钟以内。
注意事项:使用该方法时,要求从校准拍摄到测试拍摄期间,各相机之间的位置关系必须保持不变。但整个相机系统可整体小心移动,用于不同的测试场景。
操作流程与建议
为了确保同步校准的精度与稳定性,在采集校准图像时必须遵循严谨的操作规范。建议流程如下:
图像采集准备工作
1. 使用 ChArUco 标定靶:
EikoTwin DIC 使用 ChArUco 标定靶进行相机校准。用户可以通过 EikoSim 获取,也可以使用已有的标定靶,或在 calib.io 平台上购买。
标定靶的尺寸需根据实际相机的视场(Field of View)及分辨率进行匹配和选型。
2. 相机配置
光学设置:景深必须足够,以确保零件在整个测试过程中保持聚焦
定位:将相机的相对位置牢牢固定。拍摄校准目标图像后,除非进行新的校准,否则不应进行任何相对更改。
3. 标定靶的定位与取景
标定靶应占据图像至少50%的面积,且其图案必须清晰可辨
理想情况下,标定靶应放置在待测部件所在位置,即测试时感兴趣区域的实际占位
如果景深有限或部件体积较大,最好暂时移除该部件以定位校准目标,或者移动整个相机系统。
4. 图像质量检查
每次采集均需检查图像清晰度、过曝及反光情况
确保单次采集中至少90%的校准板区域可见,以保证标记点与角点的可靠检测
5.多角度图像采集
将标定靶置于双相机视场中心
按以下方位采集图像:
▸ 零旋转(标定靶平面与图像平面平行)
▸ 绕垂直轴±20°旋转
▸ 绕水平轴±20°旋转
6. 全视场覆盖校准
在视场四角重复上述操作,以扫描相机覆盖的立体空间,确保整个测试区域的校准精度
该流程既保证处理所需的图像质量,也确保了EikoTwin DIC估算的校准参数可靠性
如果无法同步怎么办?
在某些设备或测试限制不允许相机同步的配置中,混合校准程序仍然是一种有效的替代方法(本文第一张图的右侧列)。
本次全新校准功能为EikoTwin DIC用户提供了两种可选工作流程:
◆ 方案一:自动网格生成
该流程支持直接在图像上定义网格并进行2D/3D位移测量,无需有限元模型支持
➡️ 无需网格对齐,3分钟内即可获得可用结果,处理速度极快
局限:由于未建立与有限元模型的对应关系,无法进行试验-仿真对比分析
◆ 方案二:基于有限元网格的测量
完整工作流程,适用于需要试验-仿真对比或需在部件三维坐标系下工作的场景
包含:
网格对齐:通过网格中部件的已知点,在三维坐标系中重定位相机方位
最终校准:优化投影矩阵并更新有限元模型形态,以修正检测到的偏差
技术总结
EikoTwin DIC此次推出的图像同步校准新技术具有以下优势:
显著提升测量任务的精度与鲁棒性
在可同步配置中简化实施流程
提供两种差异化解决方案:
▶ 极速实施的自动网格方案(纯测量场景)
▶ 支持有限元网格对齐的标准流程(深度分析/仿真重校准必备),可实现更高重复性与稳健性的校准
EikoTwin DIC,非接触应变测量,DIC的同步校准,DIC测量稳健性
上一页
上一页