

在仿生软体机器人与人机交互领域人体运动生物力学分析扮演着怎样的角色?
发布时间:
2025-06-18 16:09
来源:
近年来,仿生软体机器人与人机交互技术迅速发展,成为机器人学、生物医学工程和人工智能交叉领域的研究热点。在这一进程中,人体运动生物力学分析发挥着关键作用,它不仅为仿生机器人的设计提供灵感,还优化了人机协作的效率和自然性。特别是在动作捕捉、力学建模和交互优化等方面,生物力学分析技术已成为不可或缺的工具。
1. 仿生软体机器人的设计灵感来源
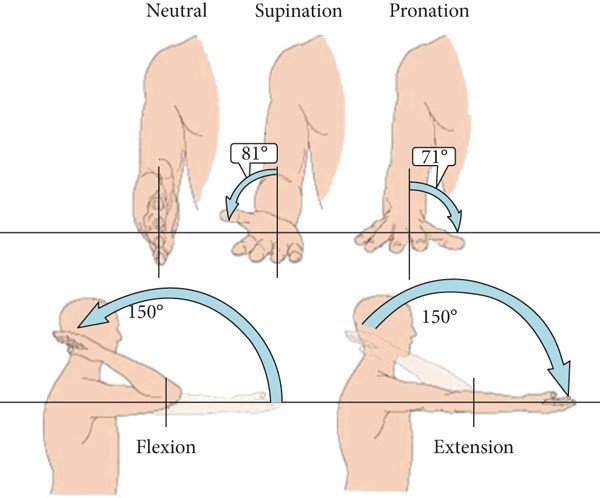
仿生软体机器人的核心目标是模仿生物体的运动方式,尤其是人类的柔顺性和适应性。例如,哈佛大学的科研团队开发的软体机械手,其抓握动作的优化就借鉴了人类手指的生物力学特性,而要精确解析这些特性,离不开对人体运动数据的采集与分析。 BOB人体运动生物力学分析软件在这一过程中提供了重要支持。该软件能够通过高精度运动捕捉和力学计算,解析人体关节角度、肌肉协同模式和受力分布,从而帮助研究人员提取关键运动参数,并将其应用于软体机器人的结构优化。例如,在开发仿生脊柱机器人时,研究人员利用生物力学数据模拟人类脊柱的柔韧性和承重能力,使机器人动作更加自然。

2. 人机交互的自然化与安全性提升
人机交互(HRI)的核心挑战之一是让机器人理解并适应人类的运动意图。例如,在康复机器人或外骨骼设备中,机器需要实时响应用户的动作,避免刚性接触导致的不适或伤害。生物力学分析在此过程中起到关键作用,它能够量化人体运动的动力学特征,为控制算法提供精准的输入参数。
研究表明,基于生物力学优化的交互策略可显著降低使用者的能量消耗,并提高动作协调性[3]。例如,在助力型外骨骼的开发中,BOB人体运动生物力学分析软件被用于评估不同步态模式下的关节力矩,从而优化动力分配策略,使外骨骼更符合人体自然运动规律。

3. 数据驱动的运动仿真与机器学习训练
随着人工智能技术的发展,生物力学数据正成为训练智能机器人算法的重要资源。例如,在模仿学习(Imitation Learning)中,机器人通过观察人类的动作数据来学习运动策略。而高质量的生物力学数据能够提高学习效率,使机器人动作更加拟人化。
在这一领域,BOB软件的高精度运动建模能力为研究人员提供了可靠的数据基础。其动力学仿真模块可以模拟不同运动场景下的肌肉-骨骼相互作用,帮助优化机器人的运动控制算法。例如,在柔性抓取机器人的训练中,结合生物力学数据的强化学习模型表现出更高的操作灵活性和适应性。
4. 未来展望
随着仿生软体机器人和人机交互技术的进一步发展,生物力学分析的作用将更加凸显。未来,结合实时生物反馈的智能机器人系统有望在医疗康复、智能制造和家庭服务等领域实现更广泛的应用。而BOB人体运动生物力学分析软件等工具,将继续为这一跨学科研究提供关键技术支持。
BOB人体生物力学分析软件,仿生软体机器人设计,人机交互数据采集